
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Anti-adhesion frame-type awtomatikong pag-load at pag-load machine para sa mga plato
Kapag ang mga workpieces ng muwebles ay na -load sa buong mga palyete, dahil sa air pagkamatagusin ng materyal, ang antas ng akma sa pagitan ng mga workpieces,
At ang pagdikit ng pandikit sa mga gilid, ang manipulator ay maaaring maging sanhi ng pagdirikit ng isa't isa kapag kumukuha ng mga workpieces:
Ang target ay upang kunin ang isang layer ng mga workpieces, ngunit sa katotohanan, maaari itong kumuha ng 3-4 na layer.
Ito ay magiging sanhi ng isang serye ng mga negatibong epekto at lubos na mabawasan ang pagiging maaasahan ng operasyon ng kagamitan.
Ang kagamitan ay may mataas na mga kinakailangan para sa mga plato na mai -load: mas mahaba ang mga plato ay inilalagay, mas magaan ang akma sa pagitan ng mga plato,
At mas madali itong sumunod; Ang kalinisan ng mga plato at natitirang pandikit sa mga gilid ay maaaring magpalala ng kapwa pagdirikit sa pagitan ng mga plato.
Ang pagiging maaasahan ng pagpapatakbo ng kagamitan ay mahirap.
Ang mga problema na sanhi ng pagdirikit ng isa't isa sa pagitan ng mga plato ay nangangailangan ng pag -shutdown at manu -manong interbensyon, at madalas na nangyayari ang sitwasyong ito.
Mayroong isang mataas na peligro sa kaligtasan: Ang mga madalas na abnormalidad ay nangangailangan ng mga tauhan na pumasok at lumabas sa lugar ng pagtatrabaho ng manipulator, na nagdudulot ng isang malaking peligro sa kaligtasan.
Ang cycle ng pagsipsip ng tasa ay hindi naayos: ang taas ng talahanayan para sa paglabas ng mga plato ay naayos, ngunit kapag kumukuha,
Ang mga plato ay kinuha layer sa pamamagitan ng layer mula sa bawat papag, at ang taas ay bumababa nang paunti -unti, na patuloy na nagbabago.
Samakatuwid, kinakailangan upang magsaliksik at bumuo ng isang bagong uri ng mga naka -link na kagamitan sa automation ng pagpapakain upang tumpak na pakainin ang mga plato na drill bilang tugon sa mga problema sa itaas.
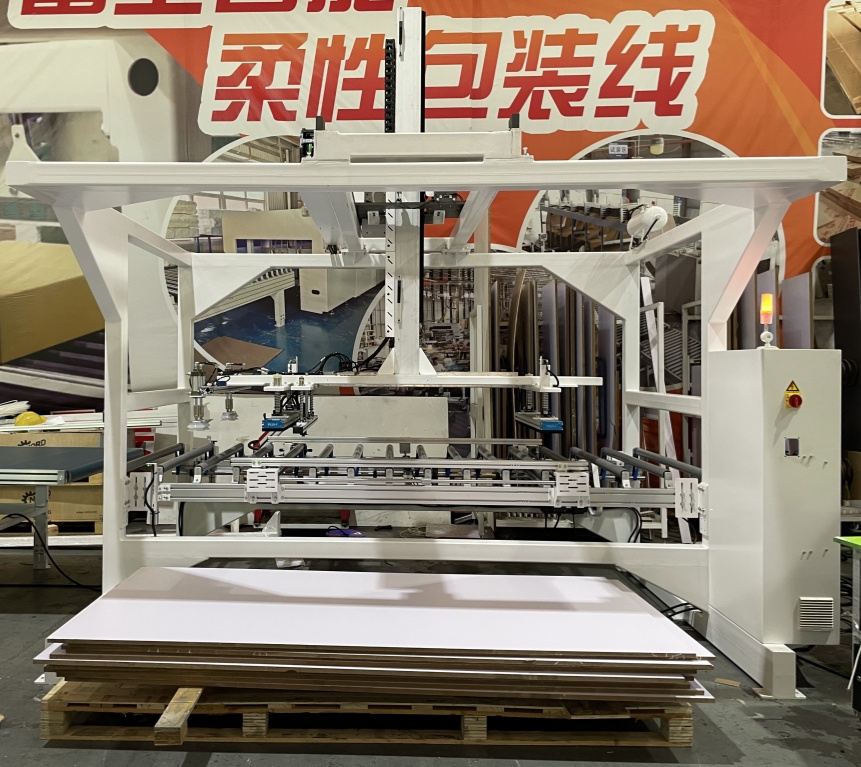

Workflow ng anti-adhesion frame-type awtomatikong pag-load at pag-load ng machine sa linya ng produksyon na batay sa panel ng kahoy
1. Paghahanda ng Paghahanda: Inilalagay ng mga manggagawa ang buong mga palyete ng mga naproseso na mga panel na batay sa kahoy sa rack ng pagpapakain ng kagamitan. Ang platform ng pag -aangat ng rack ay awtomatikong nag -aayos sa paunang taas na pagkakahawak.
2.Positioning at Grabbing: Ang Gantry Manipulator ay nagtutulak ng mekanismo ng paghawak upang ilipat nang direkta sa itaas ng mga panel. Ang isang pang -industriya na camera ay hinahanap ang posisyon ng mga panel;
Bumaba ang mga tasa ng pagsipsip upang makipag-ugnay sa ibabaw ng panel, at ang module ng anti-adhesion ay isinaaktibo nang sabay-sabay.
3.Ant-Adhesion Detection: Nakita ng isang sensor ng pag-igting ang pag-load. Matapos kumpirmahin na ang isang solong layer lamang ng panel ay nakuha, apat na maliit na mga tasa na hugis ng disc na nakadikit sa isang dulo ng panel
At nanginginig nang marahas pataas at pababa ng ilang segundo upang matiyak na ang anumang dagdag na adhered panel ay inalog. Pagkatapos ang manipulator ay gumagalaw kasama ang riles ng gabay sa port ng pagpapakain ng mga kagamitan sa pagproseso.
4.Precise Loading: Kapag ang panel ay naihatid sa itinalagang posisyon ng kagamitan sa pagproseso, pinakawalan ng mga tasa ng pagsipsip ang vacuum upang makumpleto ang proseso ng paglo -load. Kasabay nito,
Ang isa pang hanay ng mga mekanismo ng pag -agaw nang magkakasabay ay kumukuha ng naproseso na panel mula sa kagamitan at inililipat ito sa linya ng pag -aalis ng conveyor.
5.CYCLIC OPERATION: Ang nakakataas na platform ng feed rack ay unti -unting tumataas habang ang paghawak ay nagpapatuloy upang mapanatili ang matatag na taas ng ibabaw. Kapag ang lahat ng mga panel sa papag ay naproseso,
Ang kagamitan ay naglalabas ng isang materyal na pagbabago sa pagbabago.

